
 English
English 中文
中文 Deutsch
Deutsch Español
Españolはんだ付けロボットの機器構成【スティーブコラム】

スティーブコラム!
はんだ付けロボットの機器構成
目次

このコラムの動画はこちら
テーマ
ス みなさんこんにちは。ジャパンユニックス ソルダリングエンジニアのスティーブです。
今回は、はんだ付けロボットの基本的な「構成」についてお話しします。
はんだ付けロボットの構造は、手はんだ付けと似ています。
では、手はんだ付けの機能がどのようにはんだ付けロボットに組み込まれているか比較しながら見ていきましょう。

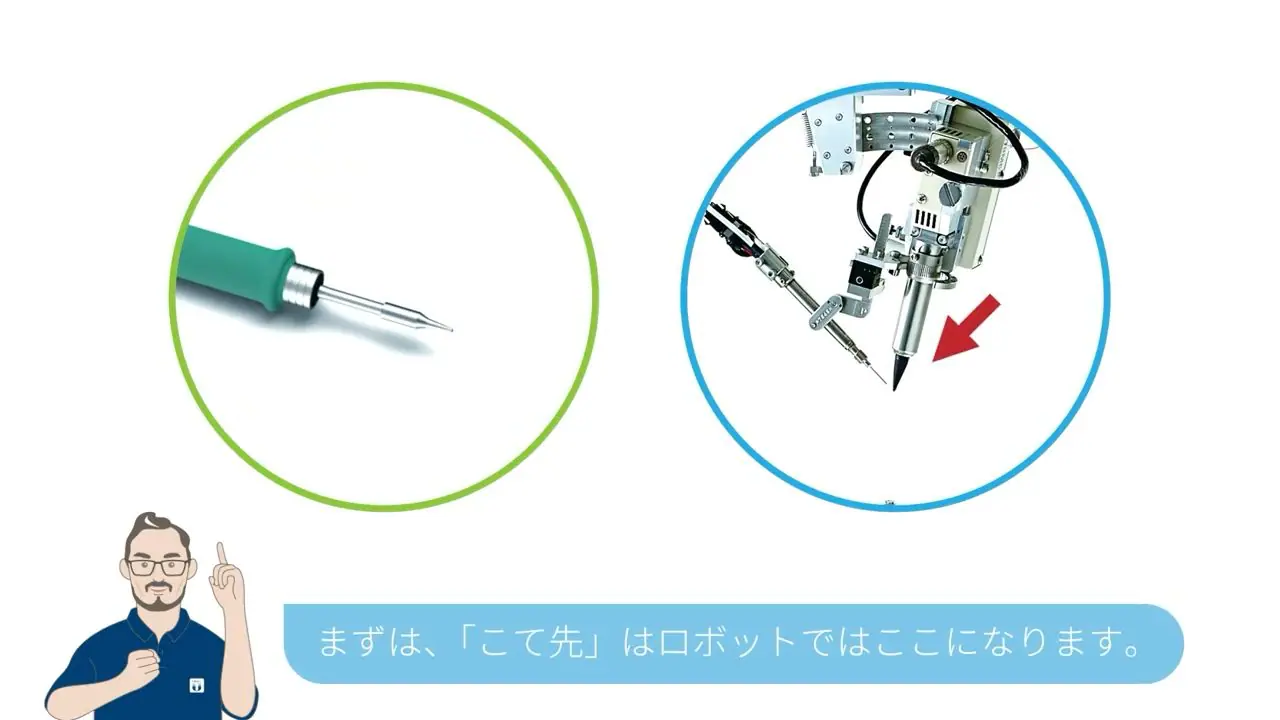
こて先
ス まずは、「こて先」はロボットではここになります。色は違いますが、基本的な材質は同じです。
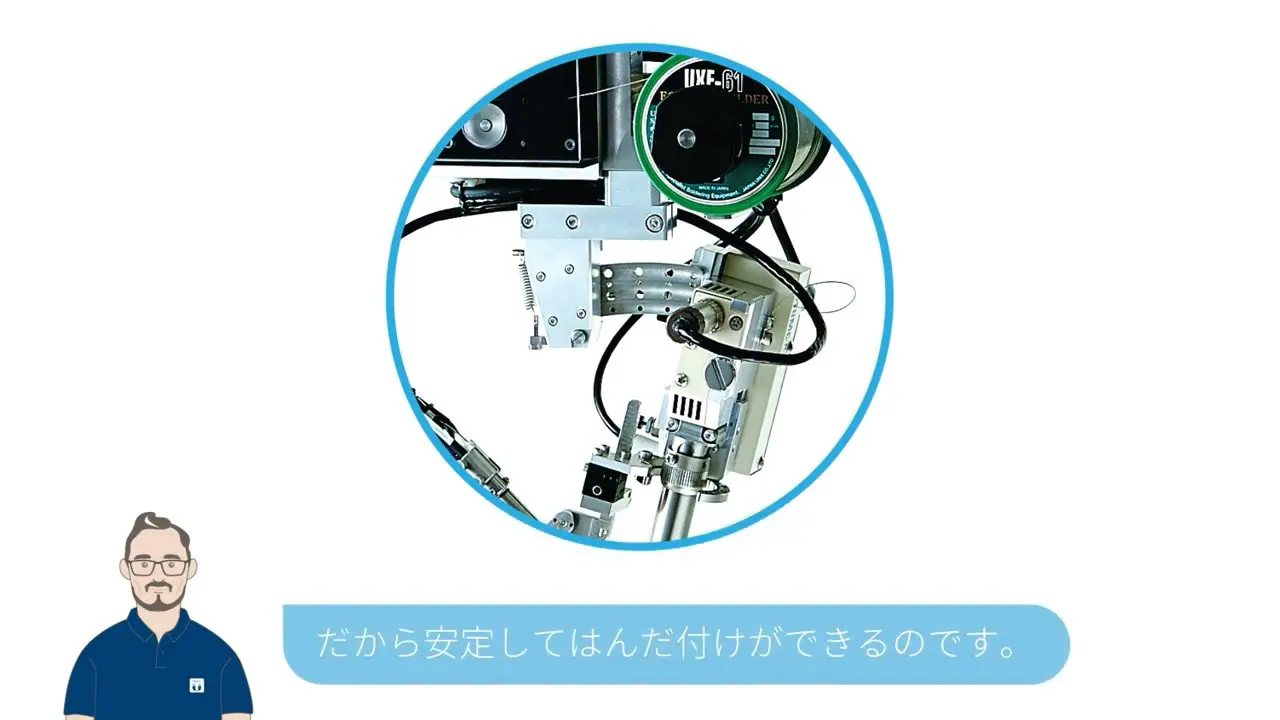
ただし、手はんだ付けと違うのはこて先の取付角度が固定できること。だから安定してはんだ付けができるのです。
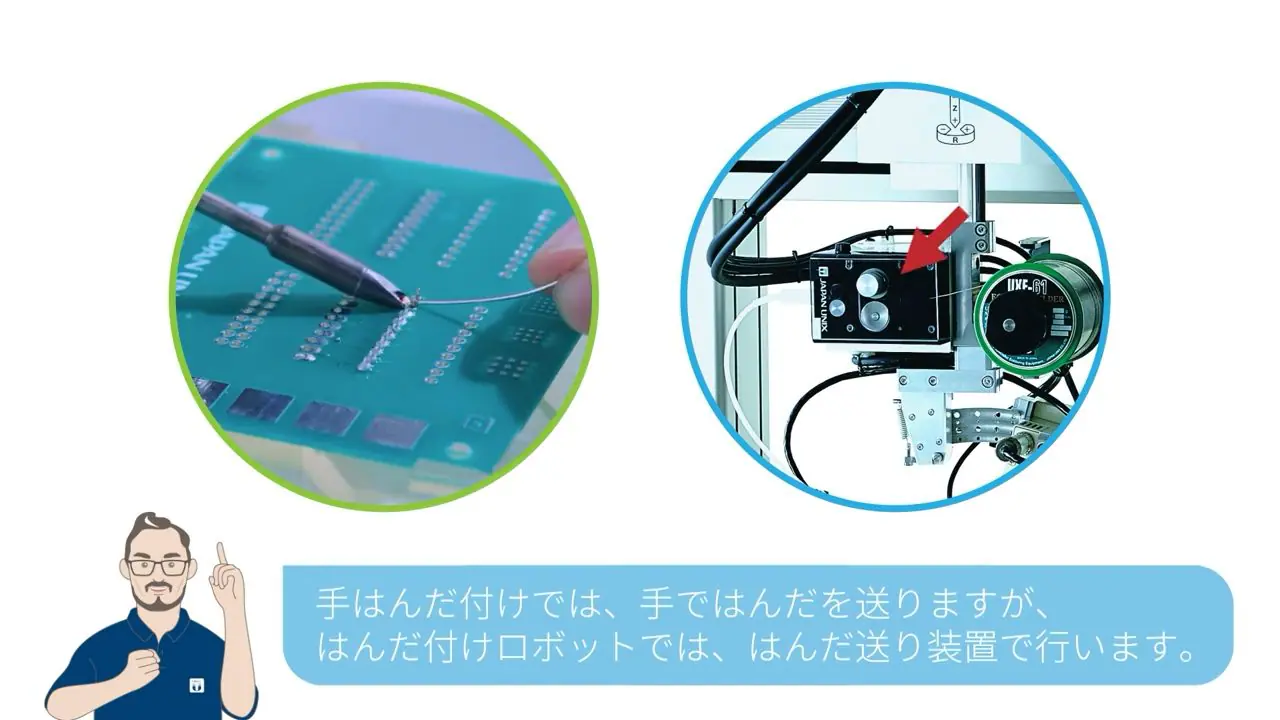
はんだ供給
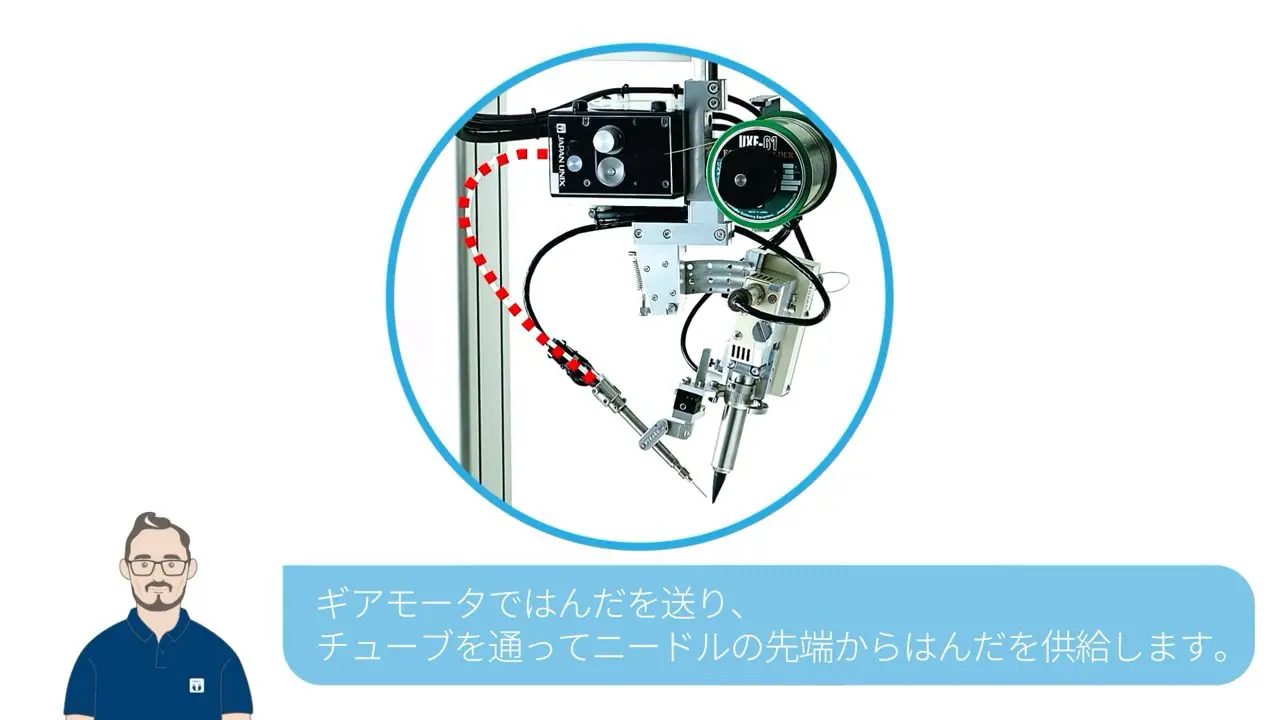
ス 次に、「はんだ供給」はロボットではここです。
手はんだ付けでは、手ではんだを送りますが、はんだ付けロボットでは、はんだ送り装置で行います。
ギアモータではんだを送り、チューブを通ってニードルの先端からはんだを供給します。
はんだ付けクリーナー
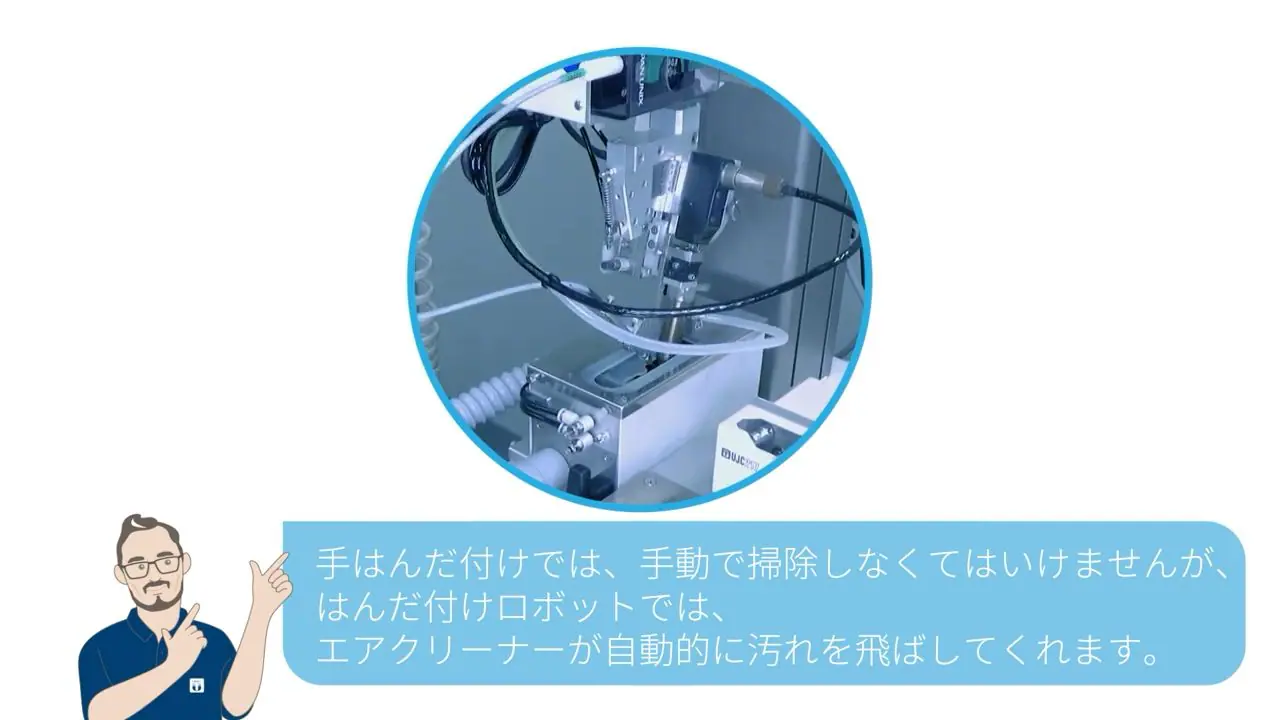
ス 続いて、「クリーナー」はロボットではここです。
手はんだ付けでは、手動で掃除しなくてはいけませんが、はんだ付けロボットでは、エアクリーナーが自動的に汚れを飛ばしてくれます。
付着したフラックスなどの汚れは、ブラシクリーナーできれいにします。

はんだごての位置決め
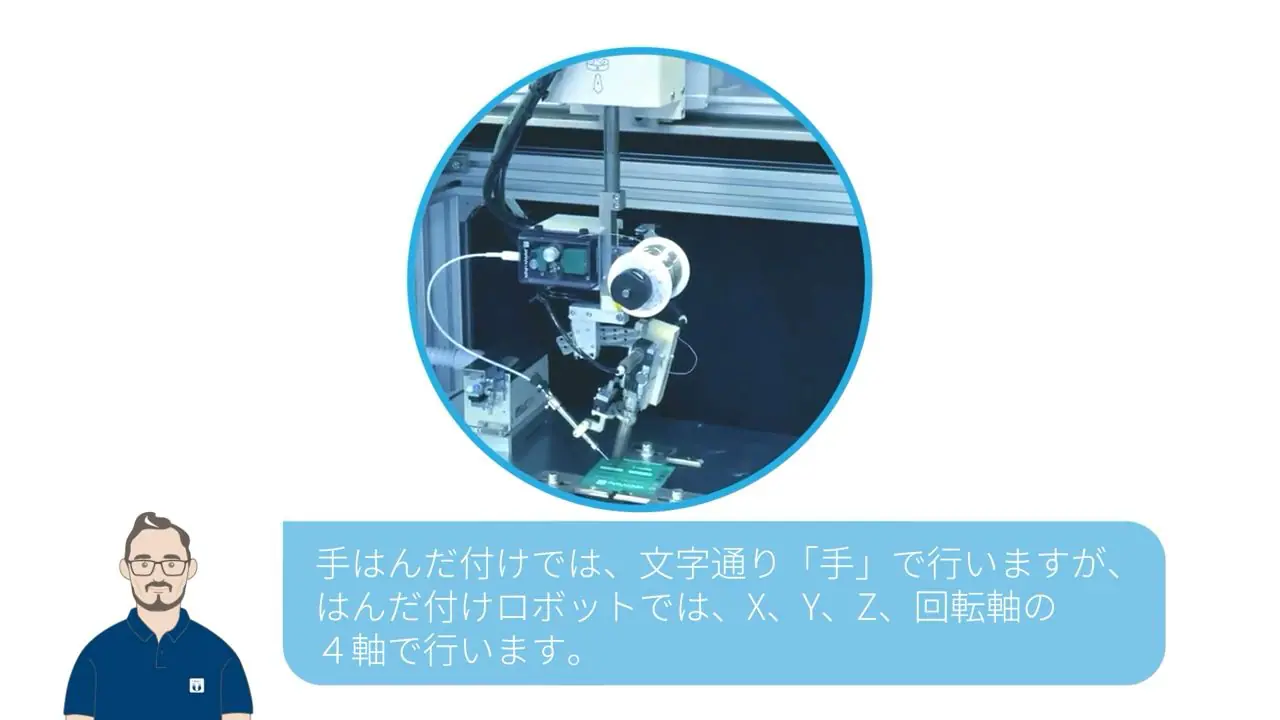
ス 手はんだ付けでは、文字通り「手」で行いますが、はんだ付けロボットでは、X、Y、Z、回転軸の4軸で行います。
設定は、ティーチングペンダントで簡単に行えます。

はんだ付けノウハウ
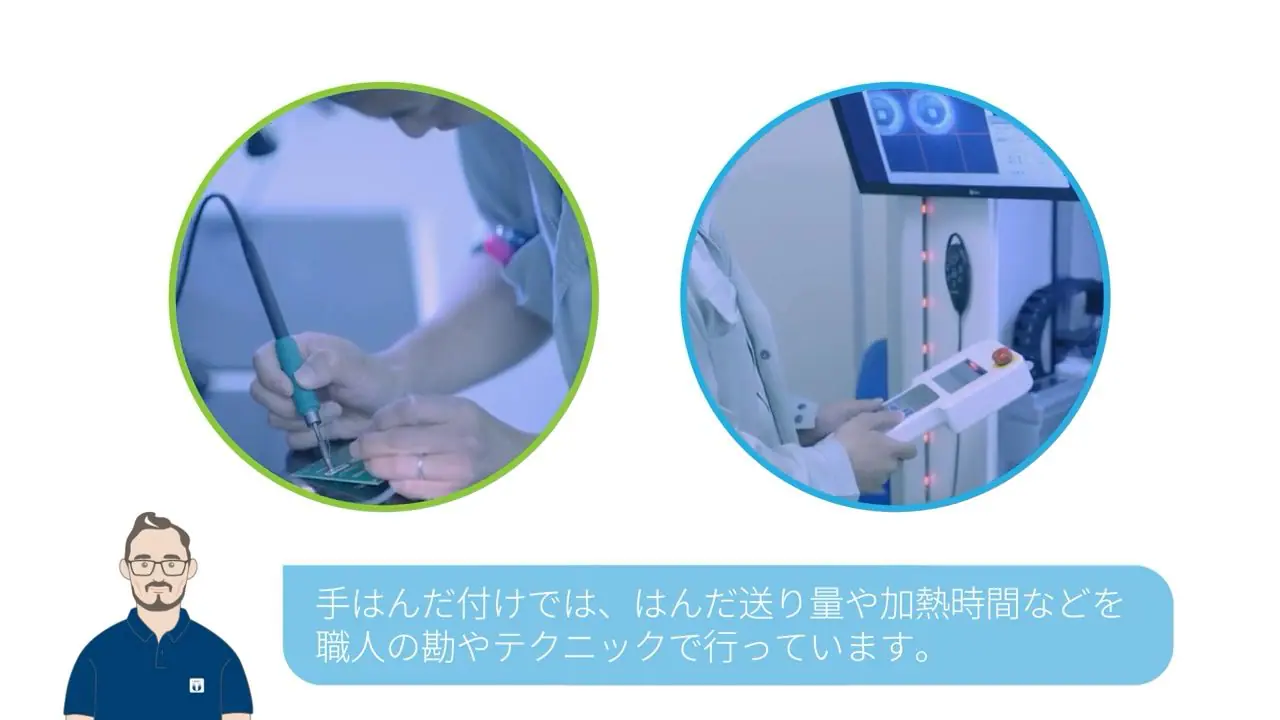
ス 最後に、「はんだ付けのノウハウ」です。
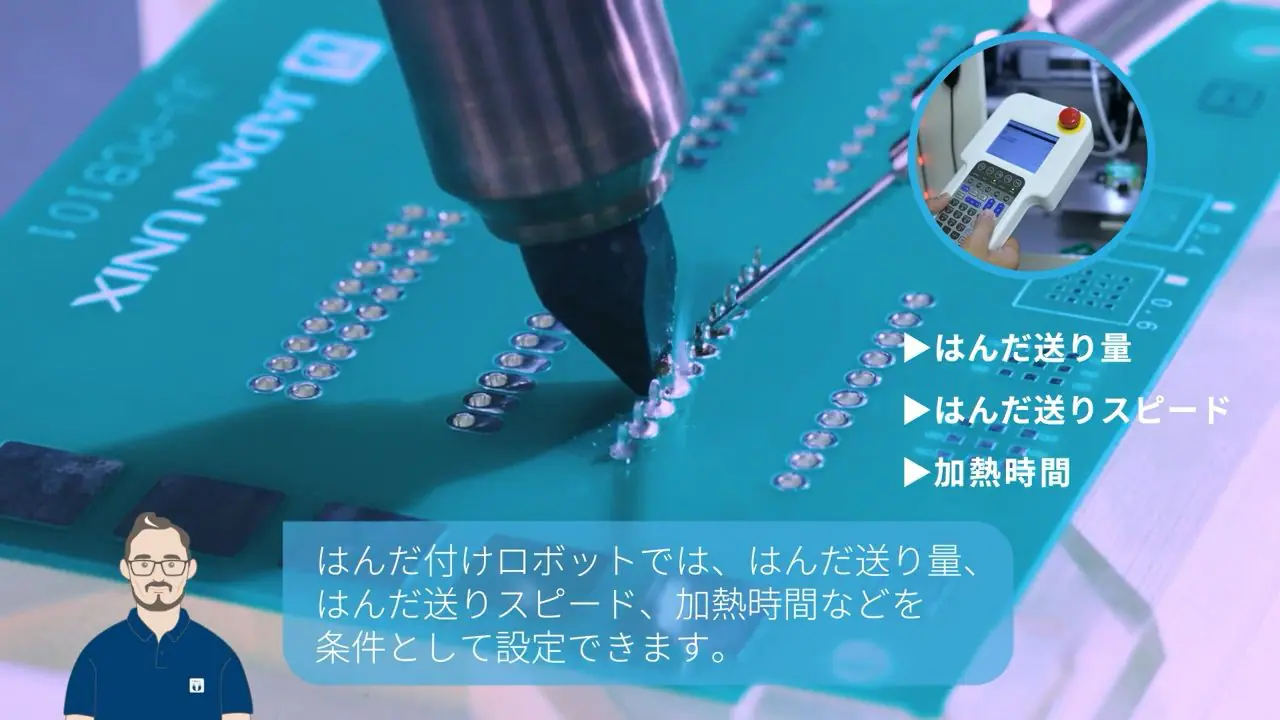
手はんだ付けでは、はんだ送り量や加熱時間などを職人の勘やテクニックで行っています。
はんだ付けロボットでは、はんだ送り量、はんだ送りスピード、加熱時間などを条件として設定できます。
これにより、職人のノウハウをロボットに覚えさせることができるわけです。
まとめ
ス はんだ付けロボットの構造は、手はんだ付けと似ていますよね?
でもそこには、ロボットにしかできない再現性や効率化などさまざまなメリットがあります。
はんだ付けの自動化を検討しているみなさん、わからないこと、聞きたいことがありましたら、お気軽にジャパンユニックスまでご相談ください。
では、またお会いしましょう!

関連製品・サービス
今回のコラムの動画はこちら