日本語
日本語 中文
中文 Deutsch
Deutsch Español
EspañolHorizontal Multi-Joint Laser Soldering Robot
Flagship High-Speed, Laser Soldering–Optimized Robot for Inline Automation



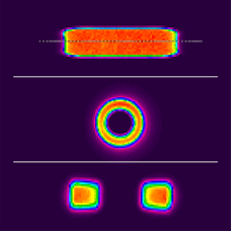
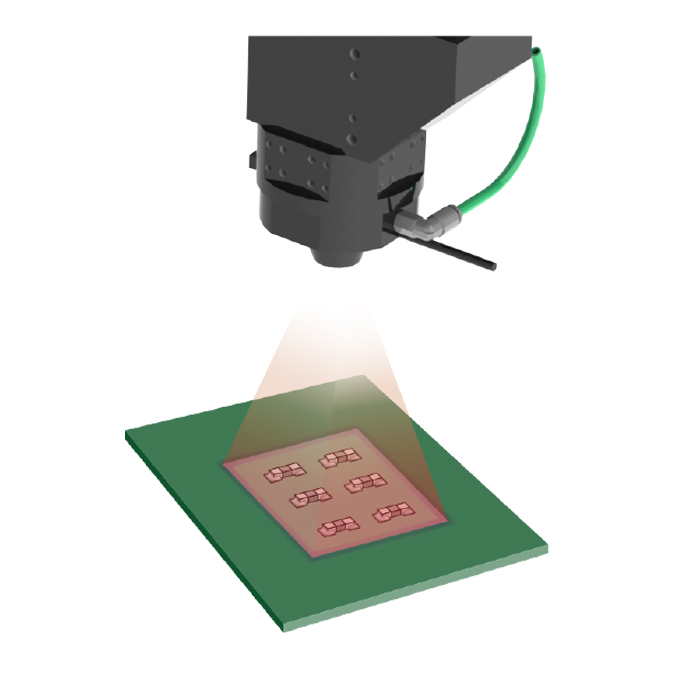
UNIX-HFRL is a horizontal multiple-joint laser soldering robot designed for production cells that require wide reach, stable path control, and repeatable heat input at each joint. Laser soldering is a non-contact process that applies selective surface heating to form reliable joints with minimal thermal impact. Japan Unix combines laser process know-how, monitoring, and traceability for consistent results.
Capabilities of UNIX-HFRL Laser Soldering Automation
Wide Working Range for Larger Assemblies
The horizontal multiple-joint structure provides a wide reachable area, making it suitable for larger boards, enclosures, and assemblies where laser access and stable positioning are critical.
Repeatable Laser Path + Process Window Control
By combining repeatable robot motion with laser process control, HFRL supports stable wetting and consistent joint formation across cycles—helpful for high-mix production and long-run operation.
Traceability-Ready Production Cells
When used with monitoring/management tools, soldering conditions can be recorded per joint and per product, supporting production governance, audits, and quality management workflows.
Feature
Horizontal Multiple-Joint Motion Optimized for Laser Access
HFRL supports stable approach angles and motion control for laser irradiation points on complex assemblies. The wide reach and flexible articulation help maintain consistent working distance and positioning within the process window.
Laser-Ready Process Control and Monitoring
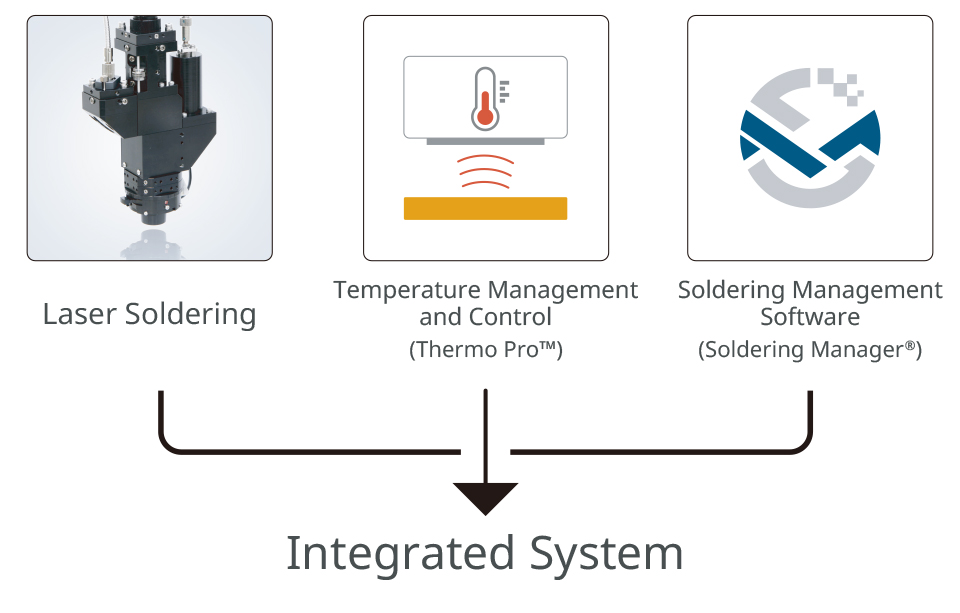
Japan Unix laser solutions emphasize not only joint formation, but also process control and visibility. HFRL can be deployed as a laser soldering cell with condition management and traceability concepts in mind.

Integration-Friendly Communication for Automated Cells
Communication interfaces enable integration with production equipment and factory systems. This supports standardized operation, condition management, and expansion from a single cell to line-level automation.
Standard Configuration
Robot Main Body (UNIX-HFRL)

Robot Controller

Laser Controller

Laser Head
Monitoring / Data Management